1514. Path with Maximum Probability
Description
You are given an undirected weighted graph of n nodes (0-indexed), represented by an edge list where edges[i] = [a, b] is an undirected edge connecting the nodes a and b with a probability of success of traversing that edge succProb[i].
Given two nodes start and end, find the path with the maximum probability of success to go from start to end and return its success probability.
If there is no path from start to end, return 0. Your answer will be accepted if it differs from the correct answer by at most 1e-5.
Example 1:
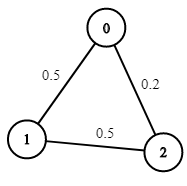
Input: n = 3, edges = [[0,1],[1,2],[0,2]], succProb = [0.5,0.5,0.2], start = 0, end = 2 Output: 0.25000 Explanation: There are two paths from start to end, one having a probability of success = 0.2 and the other has 0.5 * 0.5 = 0.25.
Example 2:
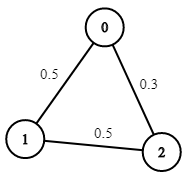
Input: n = 3, edges = [[0,1],[1,2],[0,2]], succProb = [0.5,0.5,0.3], start = 0, end = 2 Output: 0.30000
Example 3:
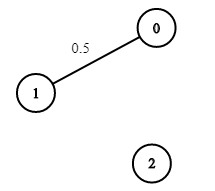
Input: n = 3, edges = [[0,1]], succProb = [0.5], start = 0, end = 2 Output: 0.00000 Explanation: There is no path between 0 and 2.
Constraints:
2 <= n <= 10^40 <= start, end < nstart != end0 <= a, b < na != b0 <= succProb.length == edges.length <= 2*10^40 <= succProb[i] <= 1- There is at most one edge between every two nodes.
Solutions
Solution 1: Heap-Optimized Dijkstra Algorithm
We can use Dijkstra's algorithm to find the shortest path, but here we modify it slightly to find the path with the maximum probability.
We use a priority queue (max-heap) $\textit{pq}$ to store the probability from the starting point to each node and the node's identifier. Initially, we set the probability of the starting point to $1$ and the probabilities of the other nodes to $0$, then add the starting point to $\textit{pq}$.
In each iteration, we take out the node $a$ with the highest probability from $\textit{pq}$ and its probability $w$. If the probability of node $a$ is already greater than $w$, we can skip this node. Otherwise, we traverse all adjacent edges $(a, b)$ of $a$. If the probability of $b$ is less than the probability of $a$ multiplied by the probability of $(a, b)$, we update the probability of $b$ and add $b$ to $\textit{pq}$.
Finally, we obtain the maximum probability from the starting point to the endpoint.
The time complexity is $O(m \times \log m)$, and the space complexity is $O(m)$. Here, $m$ is the number of edges.
Python3
class Solution:
def maxProbability(
self,
n: int,
edges: List[List[int]],
succProb: List[float],
start_node: int,
end_node: int,
) -> float:
g: List[List[Tuple[int, float]]] = [[] for _ in range(n)]
for (a, b), p in zip(edges, succProb):
g[a].append((b, p))
g[b].append((a, p))
pq = [(-1, start_node)]
dist = [0] * n
dist[start_node] = 1
while pq:
w, a = heappop(pq)
w = -w
if dist[a] > w:
continue
for b, p in g[a]:
if (t := w * p) > dist[b]:
dist[b] = t
heappush(pq, (-t, b))
return dist[end_node]
Java
class Solution {
public double maxProbability(
int n, int[][] edges, double[] succProb, int start_node, int end_node) {
List<Pair<Integer, Double>>[] g = new List[n];
Arrays.setAll(g, k -> new ArrayList<>());
for (int i = 0; i < edges.length; ++i) {
var e = edges[i];
int a = e[0], b = e[1];
double p = succProb[i];
g[a].add(new Pair<>(b, p));
g[b].add(new Pair<>(a, p));
}
double[] dist = new double[n];
dist[start_node] = 1;
PriorityQueue<Pair<Integer, Double>> pq
= new PriorityQueue<>(Comparator.comparingDouble(p -> - p.getValue()));
pq.offer(new Pair<>(start_node, 1.0));
while (!pq.isEmpty()) {
var p = pq.poll();
int a = p.getKey();
double w = p.getValue();
if (dist[a] > w) {
continue;
}
for (var e : g[a]) {
int b = e.getKey();
double pab = e.getValue();
double wab = w * pab;
if (wab > dist[b]) {
dist[b] = wab;
pq.offer(new Pair<>(b, wab));
}
}
}
return dist[end_node];
}
}
C++
class Solution {
public:
double maxProbability(int n, vector<vector<int>>& edges, vector<double>& succProb, int start_node, int end_node) {
using pdi = pair<double, int>;
vector<pdi> g[n];
for (int i = 0; i < edges.size(); ++i) {
int a = edges[i][0], b = edges[i][1];
double p = succProb[i];
g[a].emplace_back(p, b);
g[b].emplace_back(p, a);
}
vector<double> dist(n);
dist[start_node] = 1;
priority_queue<pdi> pq;
pq.emplace(1, start_node);
while (!pq.empty()) {
auto [w, a] = pq.top();
pq.pop();
if (dist[a] > w) {
continue;
}
for (auto [p, b] : g[a]) {
auto nw = w * p;
if (nw > dist[b]) {
dist[b] = nw;
pq.emplace(nw, b);
}
}
}
return dist[end_node];
}
};
Go
func maxProbability(n int, edges [][]int, succProb []float64, start_node int, end_node int) float64 {
g := make([][]pair, n)
for i, e := range edges {
a, b := e[0], e[1]
p := succProb[i]
g[a] = append(g[a], pair{p, b})
g[b] = append(g[b], pair{p, a})
}
pq := hp{{1, start_node}}
dist := make([]float64, n)
dist[start_node] = 1
for len(pq) > 0 {
p := heap.Pop(&pq).(pair)
w, a := p.p, p.a
if dist[a] > w {
continue
}
for _, e := range g[a] {
b, p := e.a, e.p
if nw := w * p; nw > dist[b] {
dist[b] = nw
heap.Push(&pq, pair{nw, b})
}
}
}
return dist[end_node]
}
type pair struct {
p float64
a int
}
type hp []pair
func (h hp) Len() int { return len(h) }
func (h hp) Less(i, j int) bool { return h[i].p > h[j].p }
func (h hp) Swap(i, j int) { h[i], h[j] = h[j], h[i] }
func (h *hp) Push(x any) { *h = append(*h, x.(pair)) }
func (h *hp) Pop() (x any) { a := *h; x = a[len(a)-1]; *h = a[:len(a)-1]; return }
TypeScript
function maxProbability(
n: number,
edges: number[][],
succProb: number[],
start_node: number,
end_node: number,
): number {
const pq = new MaxPriorityQueue({ priority: v => v[0] });
const g: [number, number][][] = Array.from({ length: n }, () => []);
for (let i = 0; i < edges.length; ++i) {
const [a, b] = edges[i];
g[a].push([b, succProb[i]]);
g[b].push([a, succProb[i]]);
}
const dist = Array.from({ length: n }, () => 0);
dist[start_node] = 1;
pq.enqueue([1, start_node]);
while (!pq.isEmpty()) {
const [w, a] = pq.dequeue().element;
if (dist[a] > w) {
continue;
}
for (const [b, p] of g[a]) {
const nw = w * p;
if (nw > dist[b]) {
dist[b] = nw;
pq.enqueue([nw, b]);
}
}
}
return dist[end_node];
}